

产业招商
NEWS CENTER
大量实验结果表明,TOFG 可以通过提高基于学习和数学模型的生成轨迹的质量和计算效率。TOFG-GAT模型在自动驾驶轨迹预测和运动规划任务上可达到并超过现有模型的水平。
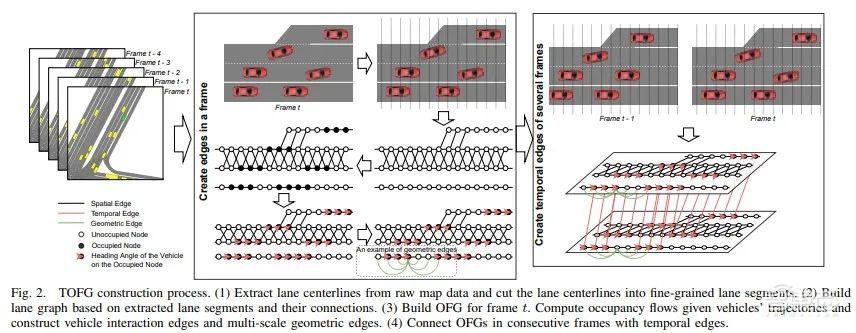

时间占用流图TOFG由多个占据流图OFG(Occupancy Flow Graph)组成◆◆■★,每个OFG包含了某一时刻的车辆以及地图信息。OFG以高精地图中的车道图为基础,融合了地图中各车辆的信息。时序边(temporal edge)将相邻两个时刻的OFG的结点连接起来,于是若干个OFG通过时间上的依赖关系,连接成了一个完整的时间占用流图TOFG。
张祎凡博士■★,毕业于香港城市大学计算科学系,现于香港城市大学(东莞)担任助理教授,研究方向为无人驾驶、智能交通系统、交通流分析及建模及交通大数据分析■★◆★,已在领域内发表顶级期刊及会议论文15篇,其中第一作者论文8篇,拥有4项发明专利,在多个顶级国际期刊及国际会议担任审稿人,包括Tranportation Research Part C★◆■◆, IEEE TITS■★,TRB★■■★★■,IROS等。
有讲座直播观看需求的朋友,可以添加小助手“陈新■■★◆■”进行报名★■★■■★。已添加过◆★★★“陈新”的老朋友,可以给“陈新”私信,发送“自动驾驶39”进行报名。对于通过报名的朋友,之后将邀请入群进行观看和交流。
准确理解环境(例如车与车和车与车道之间的相互作用)对于包括轨迹预测和运动规划在内的自动驾驶任务是至关重要的。而环境信息来自高清地图和车辆的历史轨迹。
为此,香港城市大学张祎凡老师等研究人员提出一种将车辆轨迹数据和高精地图这两种异构的数据融合成一种统一环境表达的时间占用流图TOFG(Temporal Occupancy Flow Graph)◆★。与TOFG相关的论文收录于ICRA 2023上。
将 TOFG 与基于图注意(GAT)的神经网络结合起来★◆■■,提出 TOFG-GAT 来展示 TOFG 对基于学习的轨迹预测和运动规划的好处。此外,该团队还设计了一种基于 TOFG 的交互感知采样策略,以改进基于数学采样的运动规划算法。
目前■★,已经提出了基于学习的数学的模型用于完成上述两个驾驶任务,但存在着环境理解偏差问题。具体而言,由于地图数据和轨迹数据的异构性,许多基于学习的模型以单独和顺序的方式提取车与车和车与车道之间的相互作用,从而导致预测和规划准确性降低。至于数学模型,环境信息主要用于表征无碰撞空间,而相互作用则被很大程度上忽略了◆■◆★。
10月18日晚7点★◆◆■,智猩猩邀请到香港城市大学(东莞)助理教授张祎凡参与「智猩猩自动驾驶新青年讲座」第39讲,主讲《自动驾驶中将轨迹和高精地图统一的环境表达方式》◆◆。

